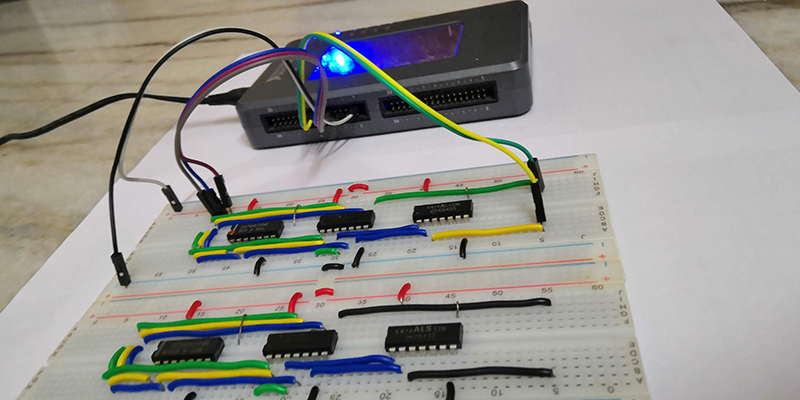
Circuit Validation using LabVIEW & TestStand
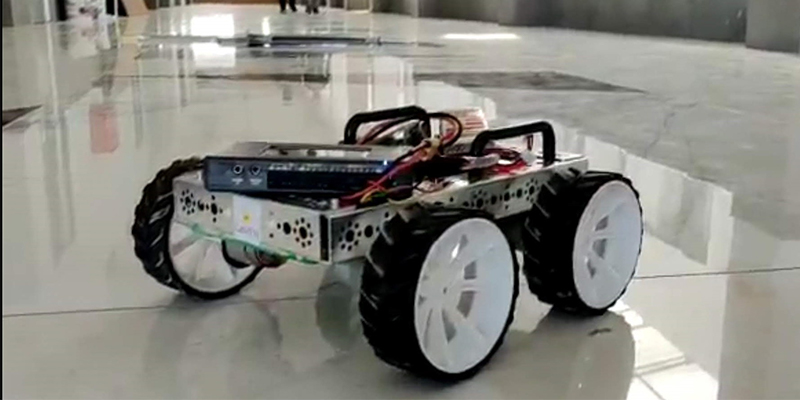
Rover using myRIO
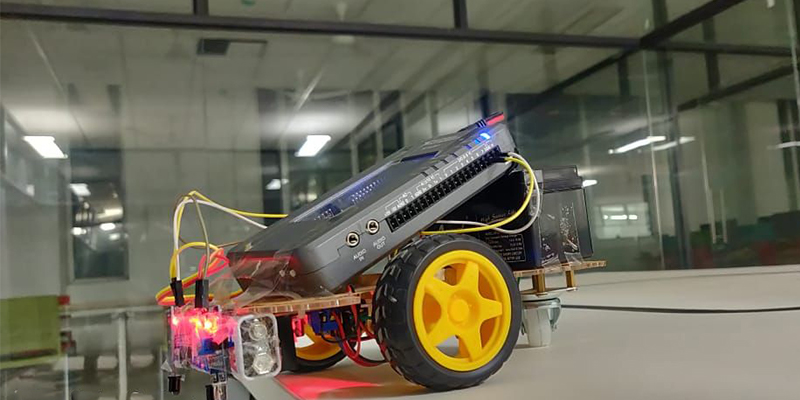
Line following rover using NI myRIO
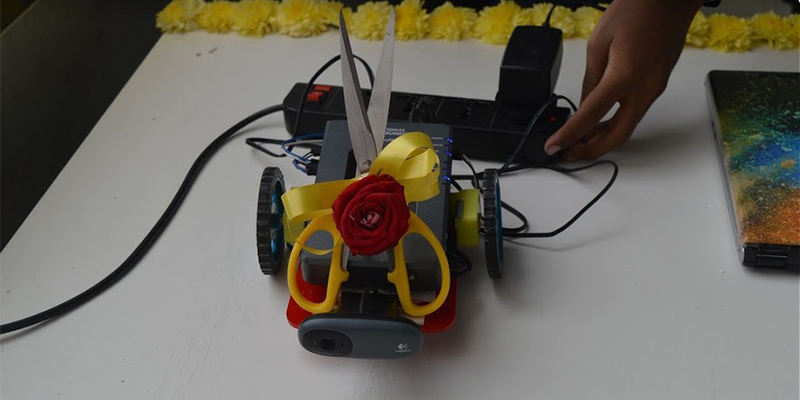
Chinni the Rover
Projects using NI myRIO
- Circuit check and validation using LabVIEW & TestStand
A project focused on verifying the functionality of electronic circuits using LabVIEW and TestStand. By using these powerful software tools, I’m able to design and implement effective test plans that ensure each circuit meets its performance requirements. This work, helps to identify and resolve issues early in the development process, which will save time and resources and helps in delivering high-quality products to market.
- 4 Wheel Rover
A 4-wheeled remote-controlled vehicle that can go into places where humans cannot go. This device has the potential to be used in a wide range of applications, from exploring hazardous environments to performing inspections in hard-to-reach areas. We were able to create a functional prototype that is capable of maneuvering through challenging terrain and tight spaces.
- Line Following Robot
A line following robot that has applications in warehouses and industries. This innovative robot is designed to follow a specific path or line on the ground, making it ideal for use in a variety of industrial settings, such as material handling and inventory management.
- Small Welcome robo (Chinni the Rover)
For the inauguration of the KLEF NI Center of Excellence at K L University, I designed a unique and innovative Welcome Robo that was specifically created to welcome the Chief Guest, Ms. Nancy Dib, Principle Manager of the EMEIA Region at National Instruments, and hand her the scissors for the ribbon cutting ceremony. This small yet powerful robot was able to effectively complete its assigned task and leave a lasting impression on those in attendance. Using my skills and expertise in engineering, I was proud to contribute to this significant event and showcase the power of technology in creating memorable experiences.
- Gesture controlled wheel chair
A wheelchair that can be operated by people with disabilities using hand gestures. This innovative device allows for a more natural and intuitive method of controlling the wheelchair, increasing the independence and mobility of disabled individuals. I was able to create a functional prototype that has the potential to make a positive impact in the lives of many people.